Introductio
Cum annis 1960 et primis annis 1970, maxime traditionales systemata aeriorum et aerospace electro-optica et electronic sensoriis systemata aerium et aerospace substituta sunt. Dum traditum aerias consequat principaliter operatur in lumine visibili necem, moderni aerium et humi fundatum systemata sentiendi remota, digitales notitias efficiunt visibiles lucem, ultrarubrum reflexum, scelerisque ultrarubrum, et proin regiones spectrales. Modi interpretandi visuales traditionales in consequat aereis adhuc utiles sunt. Adhuc, sensus remotus latius patet applicationes, inclusas operationes additas, ut exemplar theoreticum scopo proprietatum, mensurarum spectrarum obiectorum, et analysis imaginis digitalis pro extractione informationis.
Sensus longinquus, qui ad omnes notiones notorum diuturnos detectionis technicae pertinet, methodus est qua electromagnetismo utitur ad deprehendendas, notas ac mensurandas characteres scopo et definitio primum in annis 1950 proponitur. Ager remotis sentiendi et destinandi, dividitur in 2 modos sentiendi: Sensum activum et passivum, e quibus Sensus Lidar est activus, sua vi uti potest ut scopo lucem emittat et lucem inde reflexam deprehendat.
Active Lidar Sensus et Application
Lidar (lucis detectio et diffusio) technica est quae spatium mensurat innixum tempore emittendi et accipiendi laseris significationibus. Aliquando Airborne LiDAR convertibiliter applicatur cum laser aerium intuens, destinata vel LIDAR.
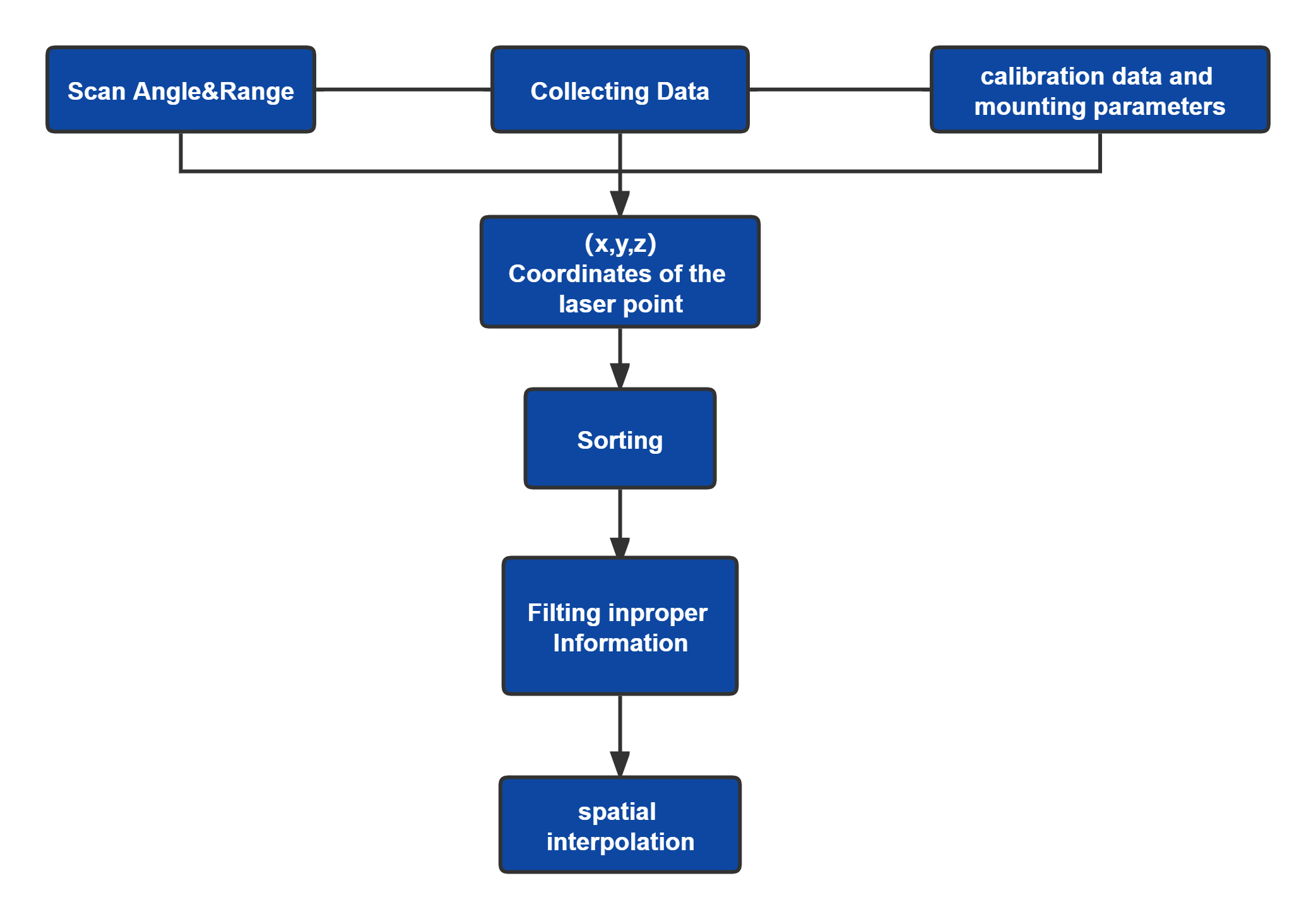
Hoc est Flowchart typicum monstrans praecipuas gradus puncti notitias processus in usu LIDAR. Collectis (x, y, z) coordinatis, haec genera disponentes efficientiam notitiarum reddendi et processus emendare possunt. Praeter processus geometricae punctorum LIDAR, vehementia notitiae ex LIDAR opiniones etiam utilis est.
In omnibus remotis sentiendi et destinatis applicationibus, LIDAR distinctum commodum obtinendi accuratiores mensuras solis et aliis tempestatibus effectibus independentes habet. Ratio sentiendi typica remota duabus partibus constat, laser inventoris et mensurae sensorem pro positione, quae ambitum geographicum in 3D sine depravatione geometrica directe metiri potest, quia nulla imaginatio implicatur (mundi 3D in plano 2D imaginatur).
QUAEDAM NOSTRI LIDAR FONS
Oculi tutum LiDAR Laser Source electiones pro sensorem


